Manipulátory pro editaci transformačních matic a skriptování v I3T
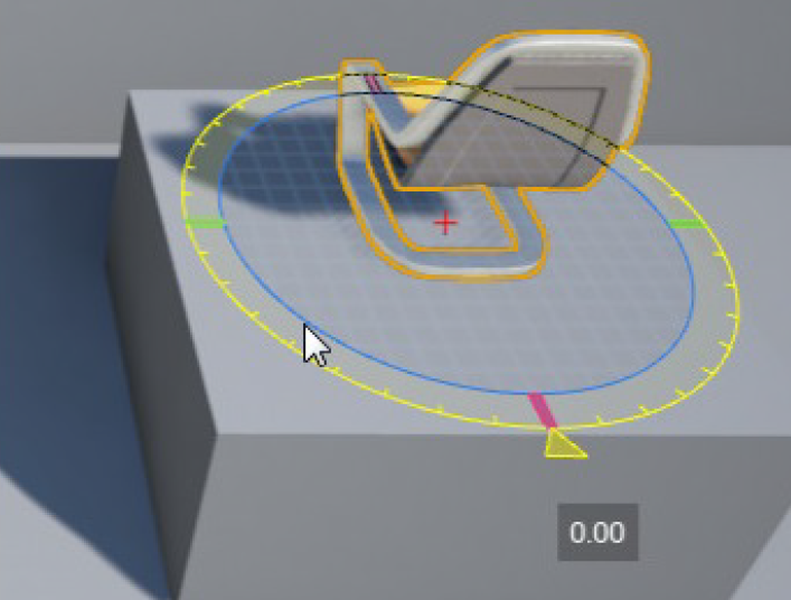
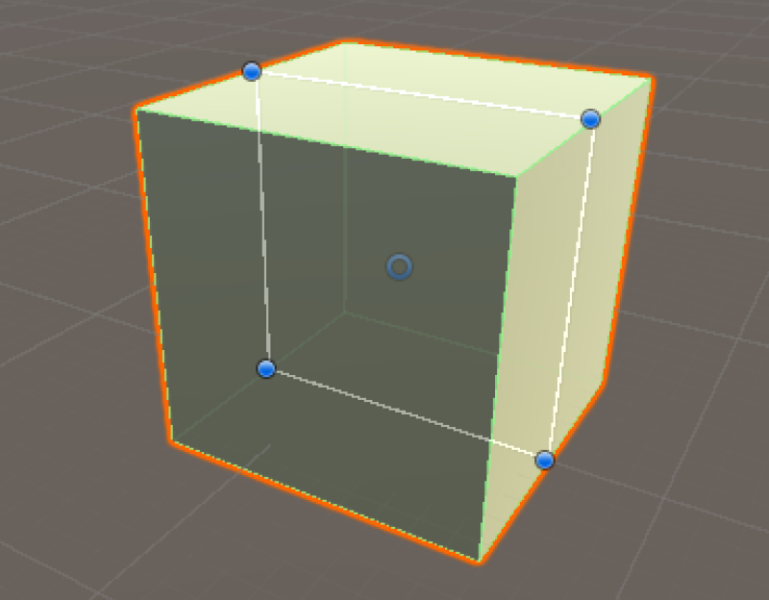
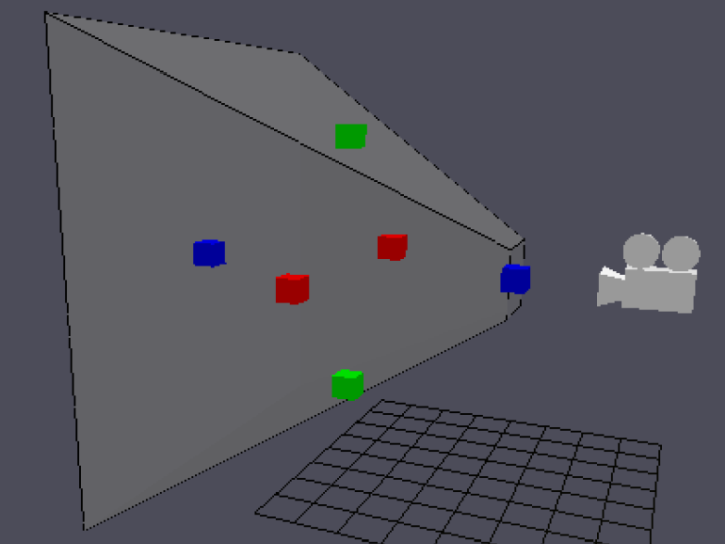
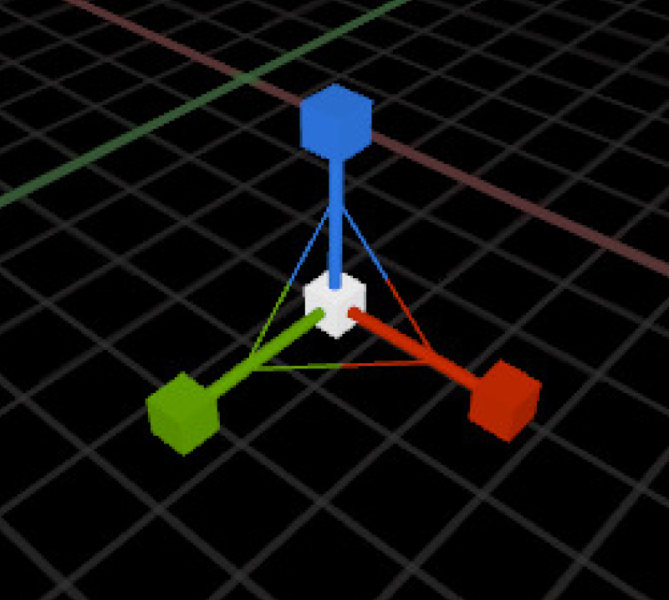
Cílem této práce je návrh manipulátorů interaktivní úpravy transformačních a projekčních matic a začlenění těchto manipulátorů do pro nástroj pro výuku transformací I3T. Návrh je učiněn na základě prostudování manipulátorů jiných 3D prostředí. Návrh je podroben testům s uživateli. Součástí práce je také rozšíření I3T o možnost zpracovávání externích skriptů.
Ukázky



Obrázky