Transformation manipulators and scripting in I3T
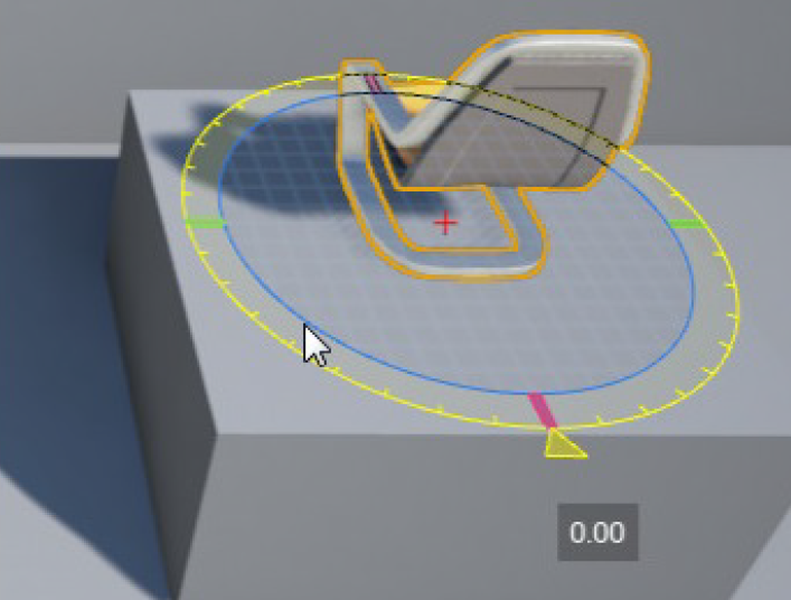
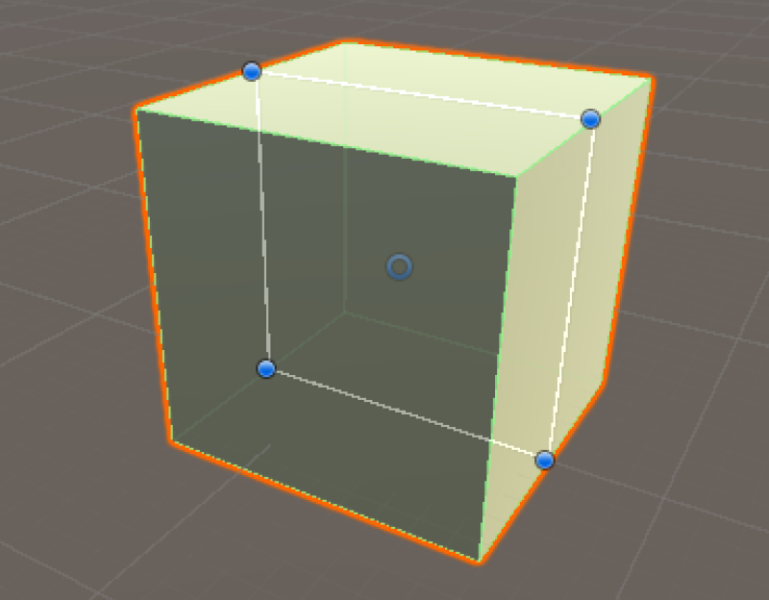
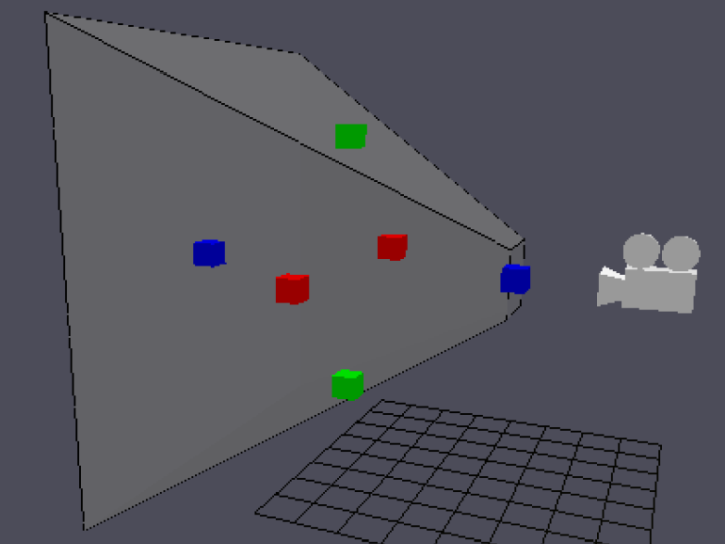
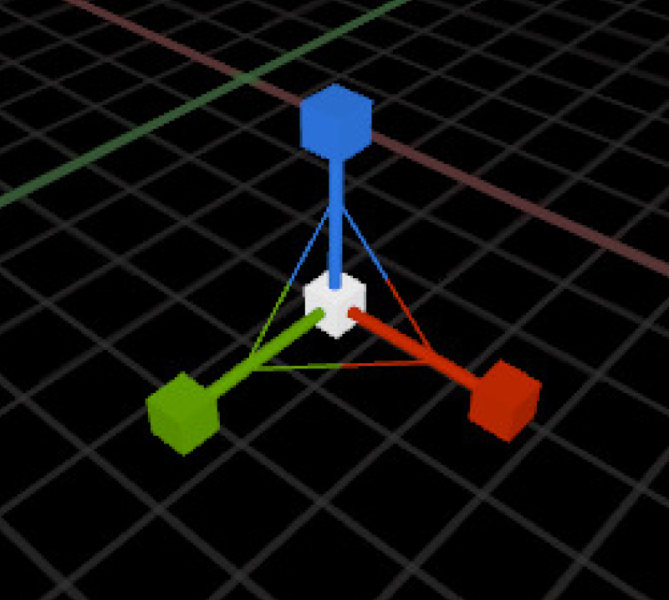
The goal of this work is design of manipulators for interactive modification of transformation and projection matrices and the integration of these manipulators into I3T-software for teaching transformations. The design is based on study of manipulators in other 3D environments. The design is subjected to tests with users. Part of the work is also extending I3T with functionality of executing external scripts.
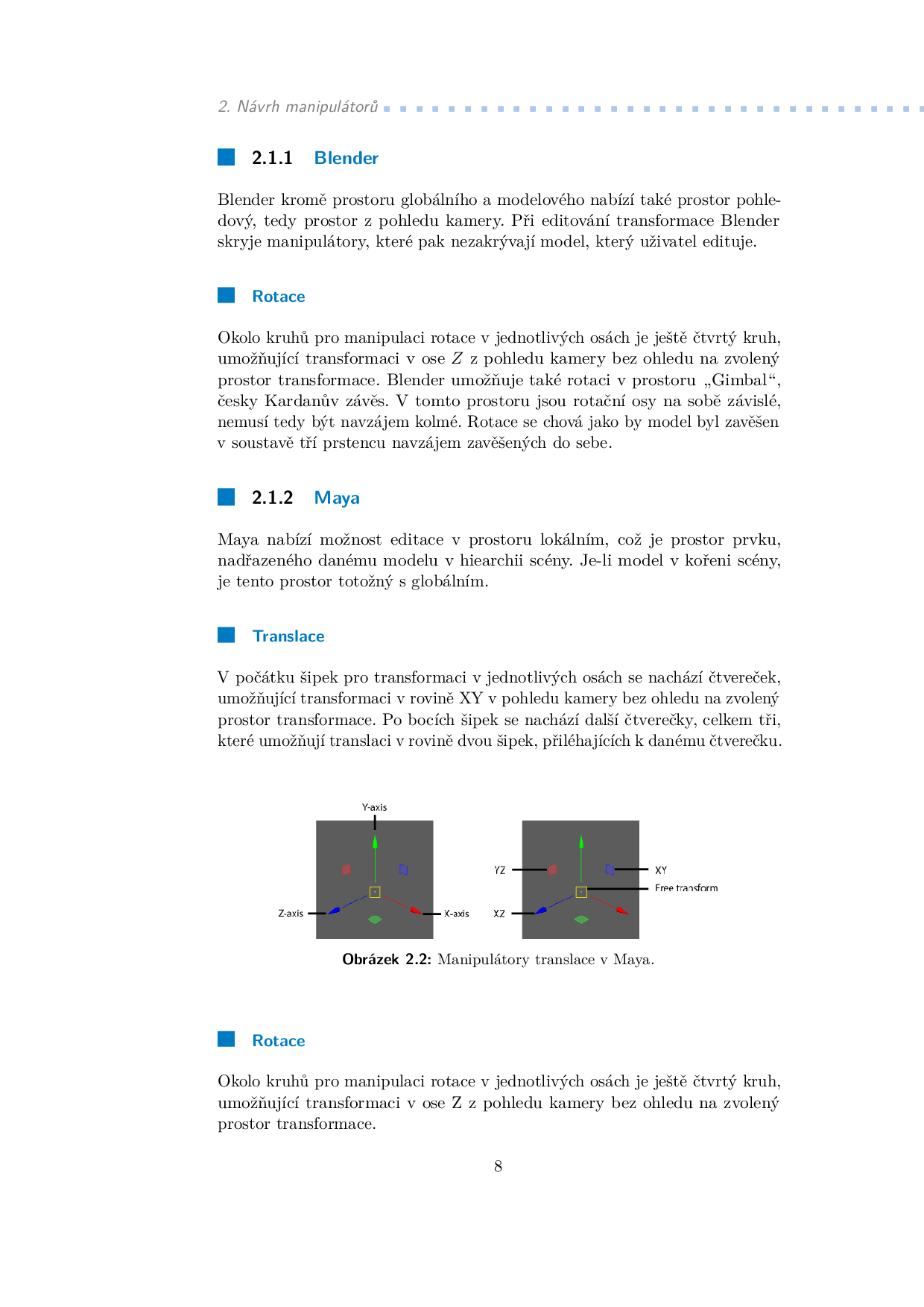
Samples



Images