Efficient Collision Detection for Spherical Blend Skinning
Proceedings of
International Conference on Computer Graphics and Interactive Techniques in Australasia and South-East Asia, pp. 147-156, 2006
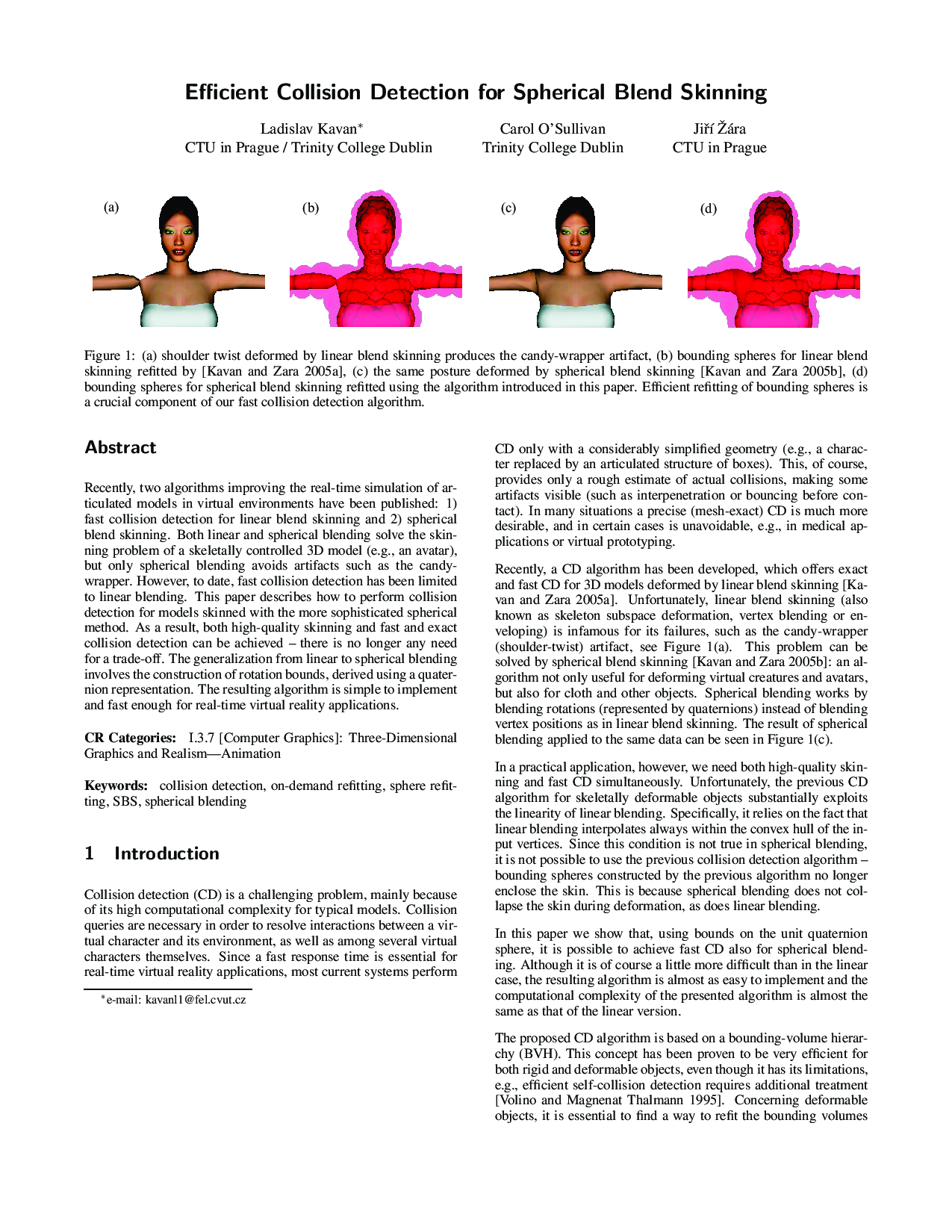
Recently, two algorithms improving the real-time simulation of articulated models in virtual environments have been published: 1) fast collision detection for linear blend skinning and 2) spherical blend skinning. Both linear and spherical blending solve the skinning problem of a skeletally controlled 3D model (e.g., an avatar), but only spherical blending avoids artifacts such as the candywrapper. However, to date, fast collision detection has been limited to linear blending. This paper describes how to perform collision detection for models skinned with the more sophisticated spherical method. As a result, both high-quality skinning and fast and exact collision detection can be achieved there is no longer any need for a trade-off. The generalization from linear to spherical blending involves the construction of rotation bounds, derived using a quaternion representation. The resulting algorithm is simple to implement and fast enough for real-time virtual reality applications.

Ukázky