Automated Outdoor Depth-Map Generation and Alignment
Computers & Graphics 74(1):109-118, 2018
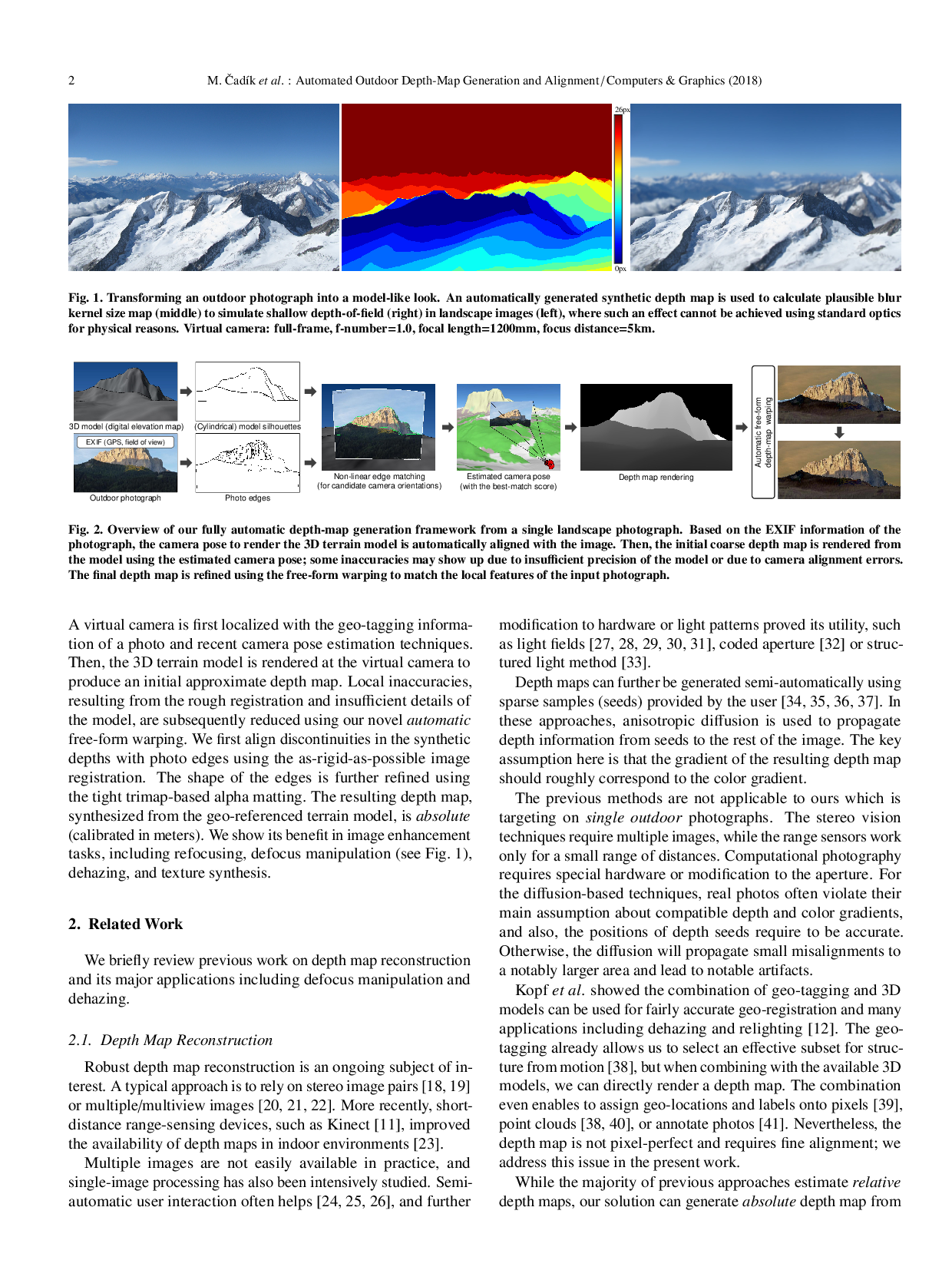
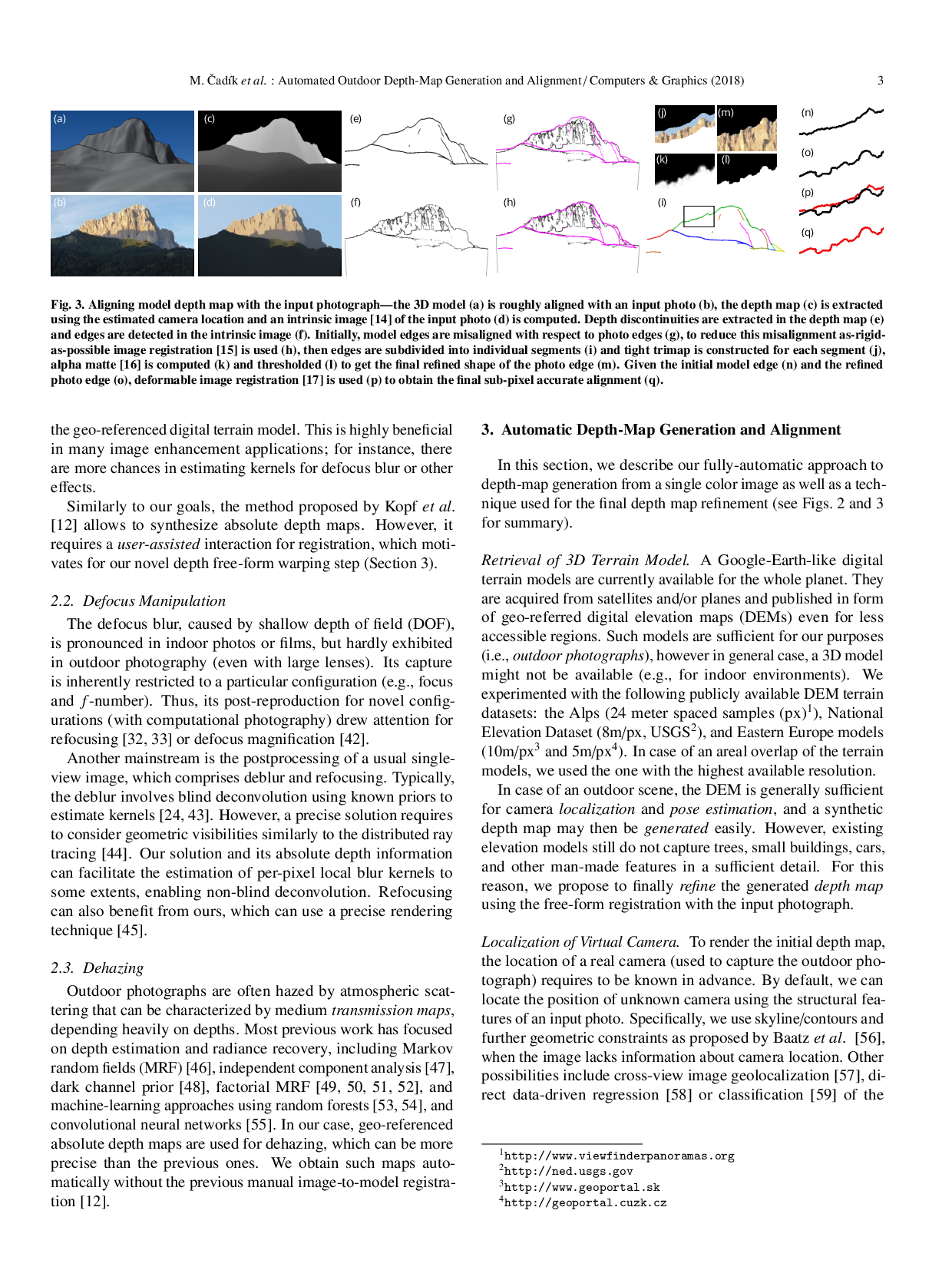
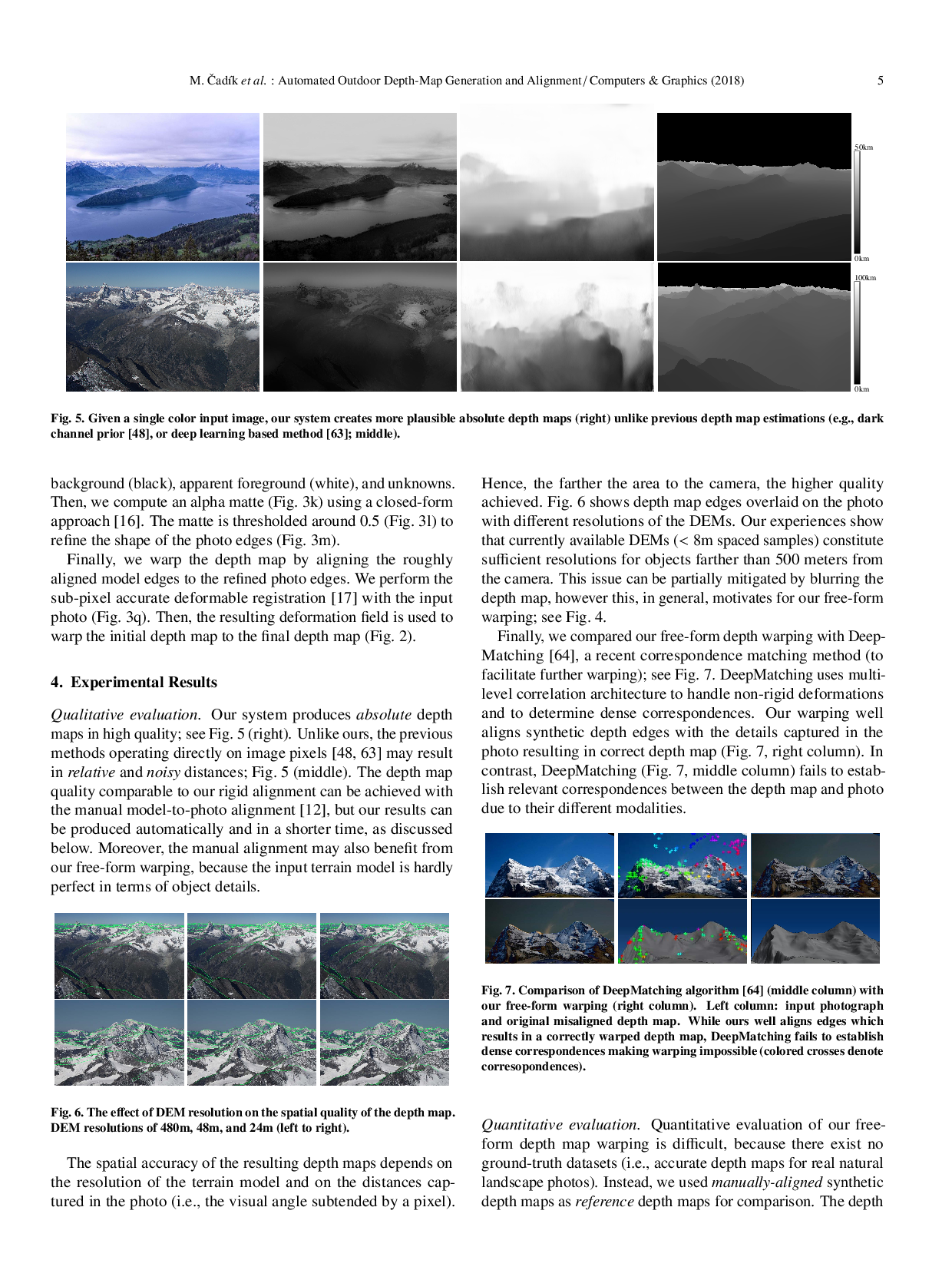
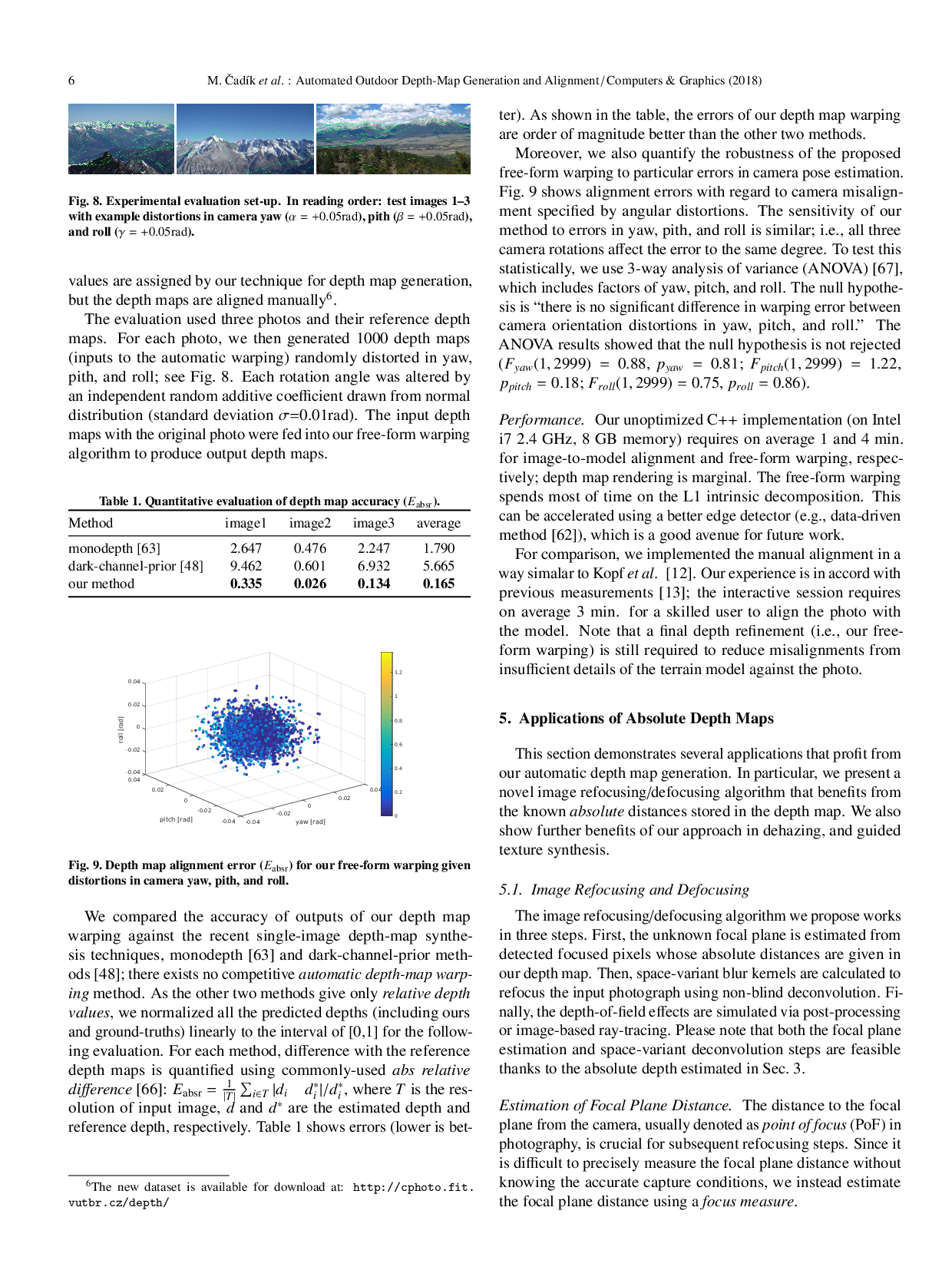
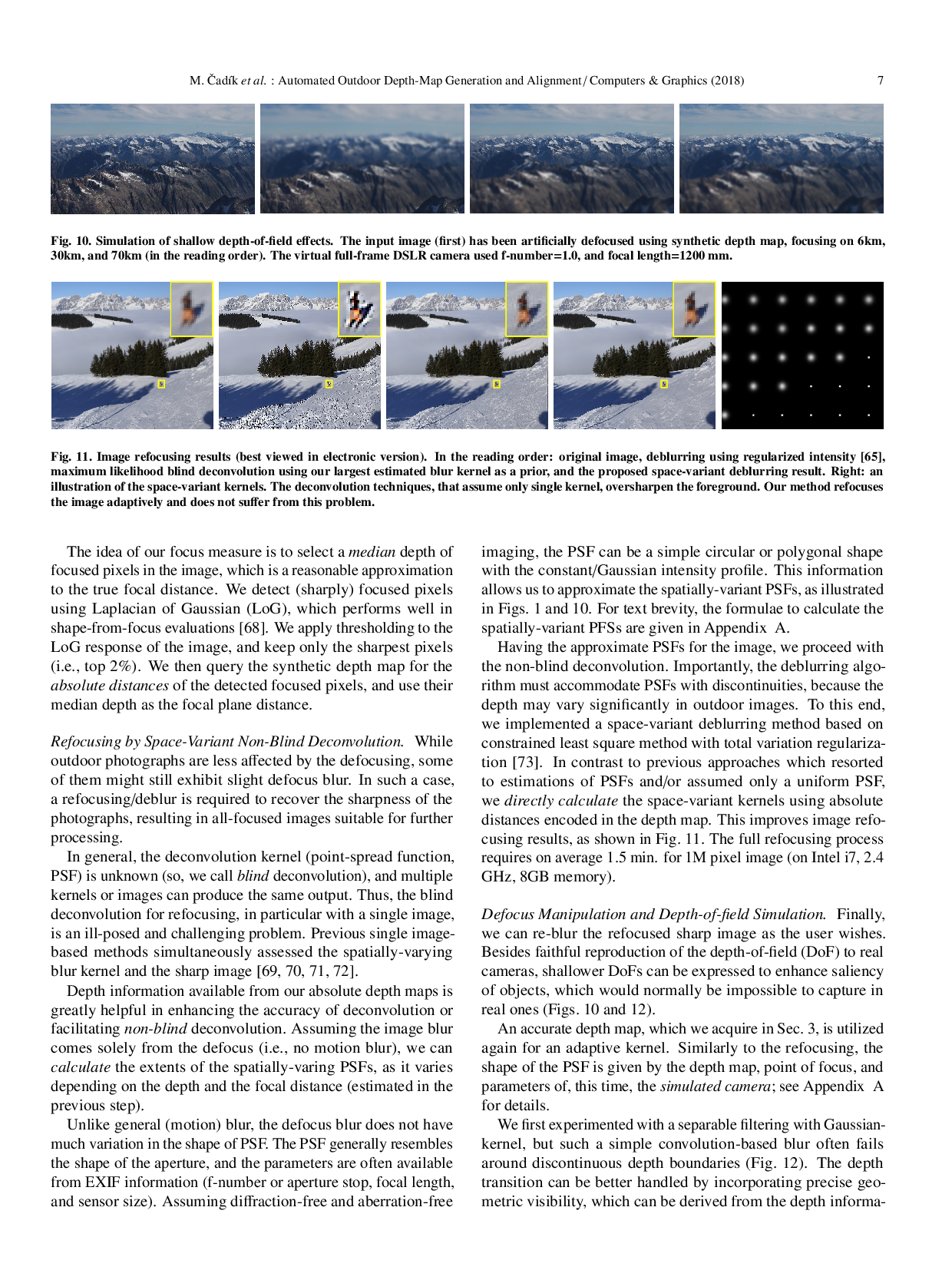
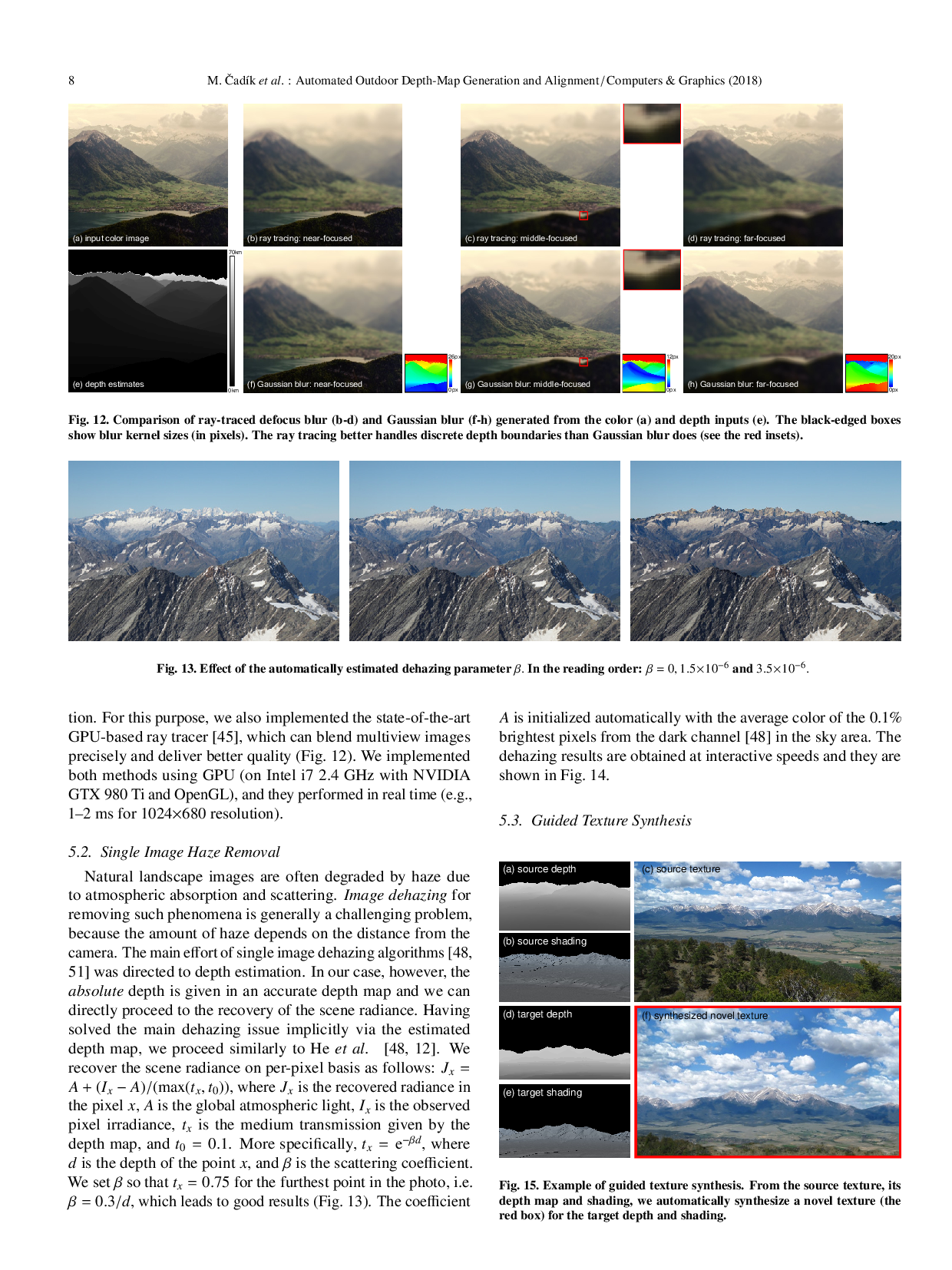
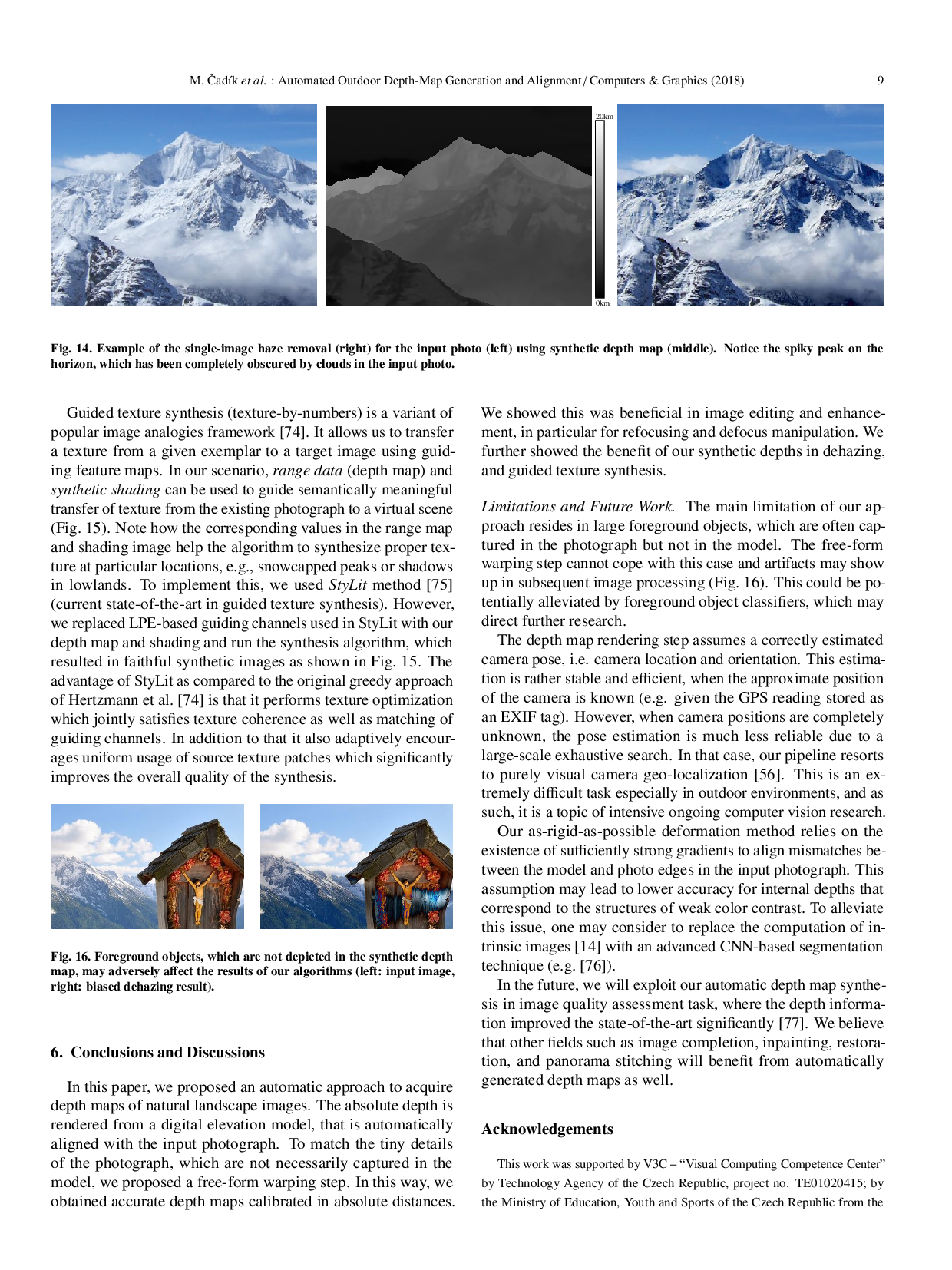
Image enhancement tasks can highly benefit from depth information, but the direct estimation of outdoor depth maps is difficult due to vast object distances. This paper presents a fully automatic framework for model-based generation of outdoor depth maps and its applications to image enhancements. We leverage 3D terrain models and camera pose estimation techniques to render approximate depth maps without resorting to manual alignment. Potential local misalignments, resulting from insufficient model details and rough registrations, are eliminated with our novel free-form warping. We first align synthetic depth edges with photo edges using the as-rigid-as-possible image registration and further refine the shape of the edges using the tight trimap-based alpha matting. The resulting synthetic depth maps are accurate, calibrated in the absolute distance. We demonstrate their benefit in image enhancement techniques including reblurring, depth-of-field simulation, haze removal, and guided texture synthesis.

Ukázky



Obrázky