Operátorské stanoviště pro vizualizaci a řízení autonomních bezpilotních prostředků
Cílem mé diplomové práce je vytvoření vizualizace bezpilotních (leteckých) prostředků, která jsou malá a rychle se pohybují, a napojit tuto vizualizaci na AgentFly simulátor. Také zjišťuji, jestli je vhodné využít webových služeb poskytujících satelitní snímky, výškové mapy a další informace jakými jsou budovy.
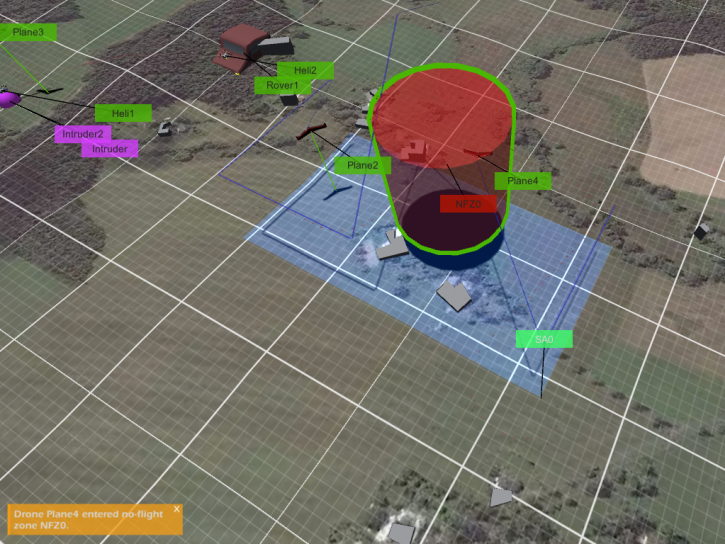
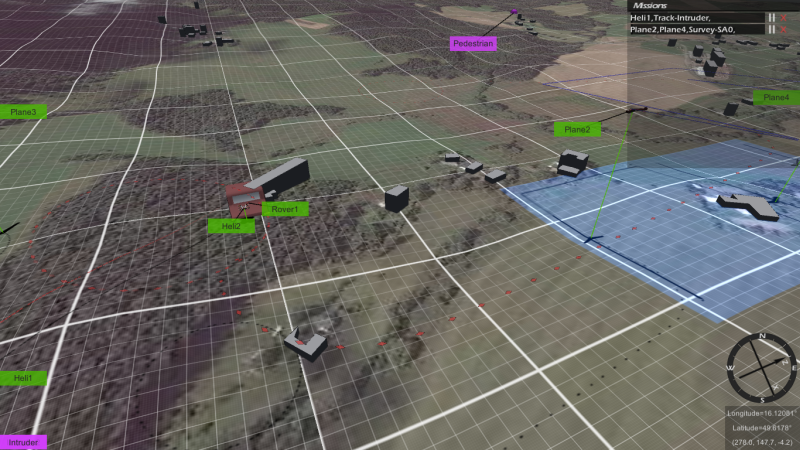
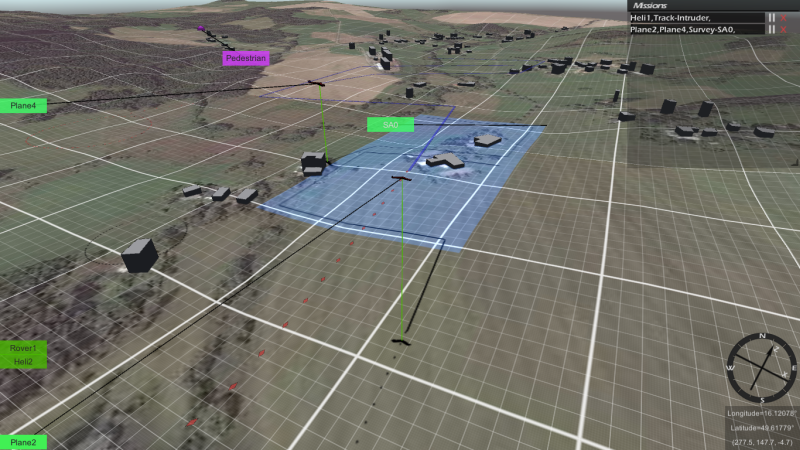
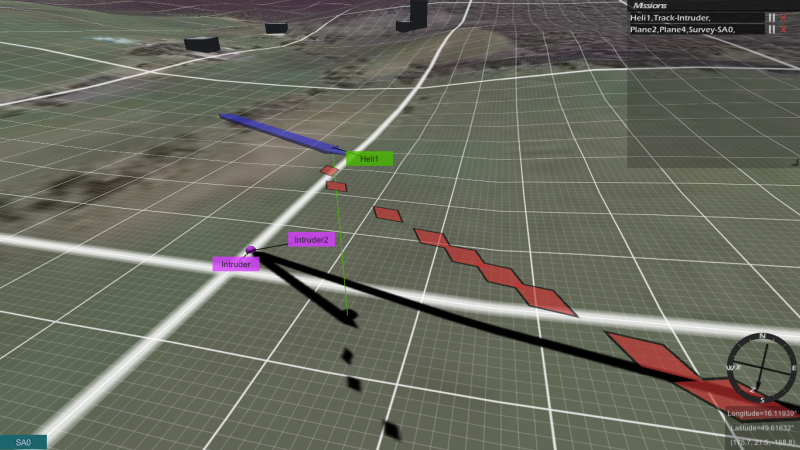
Ukázky
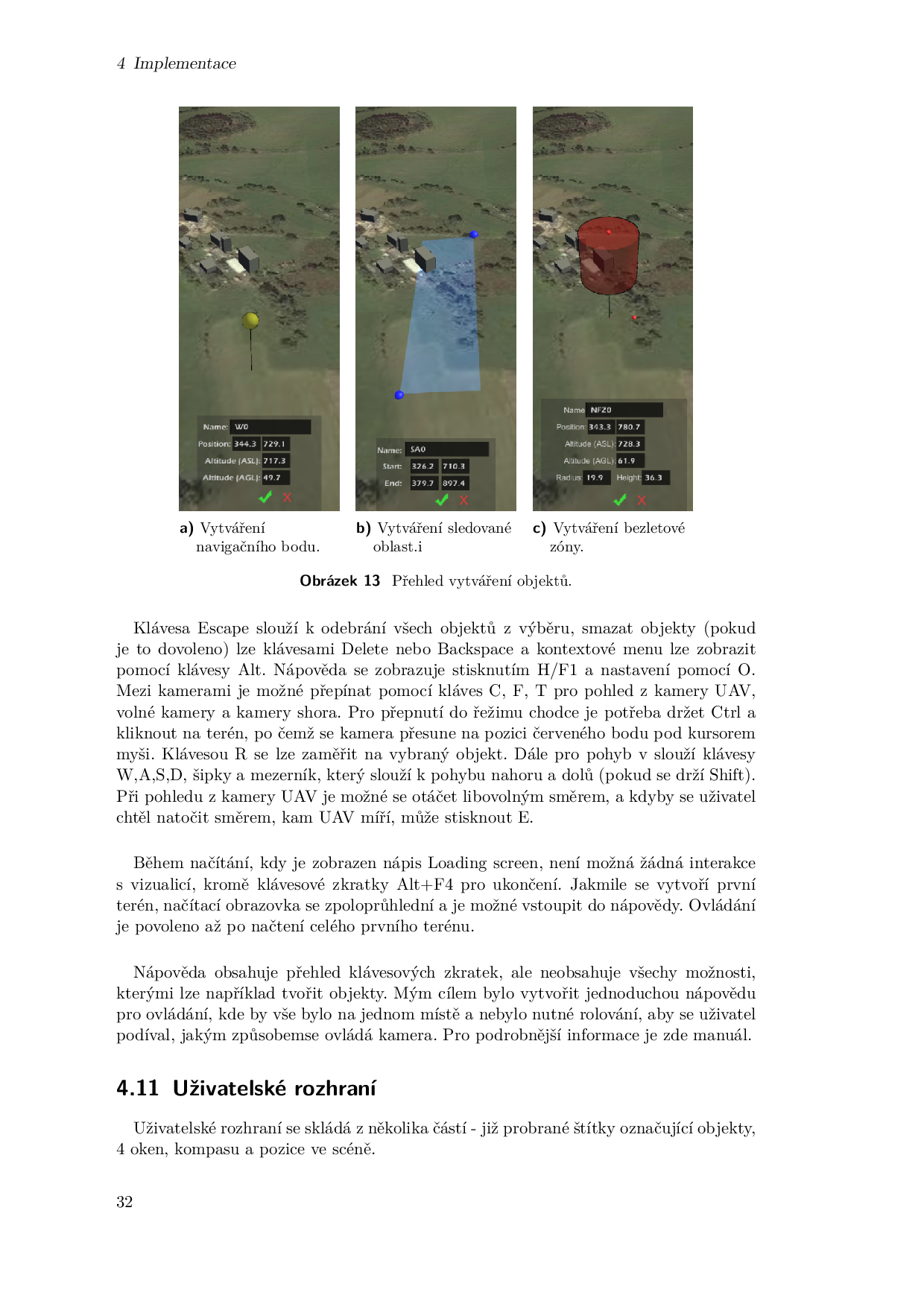
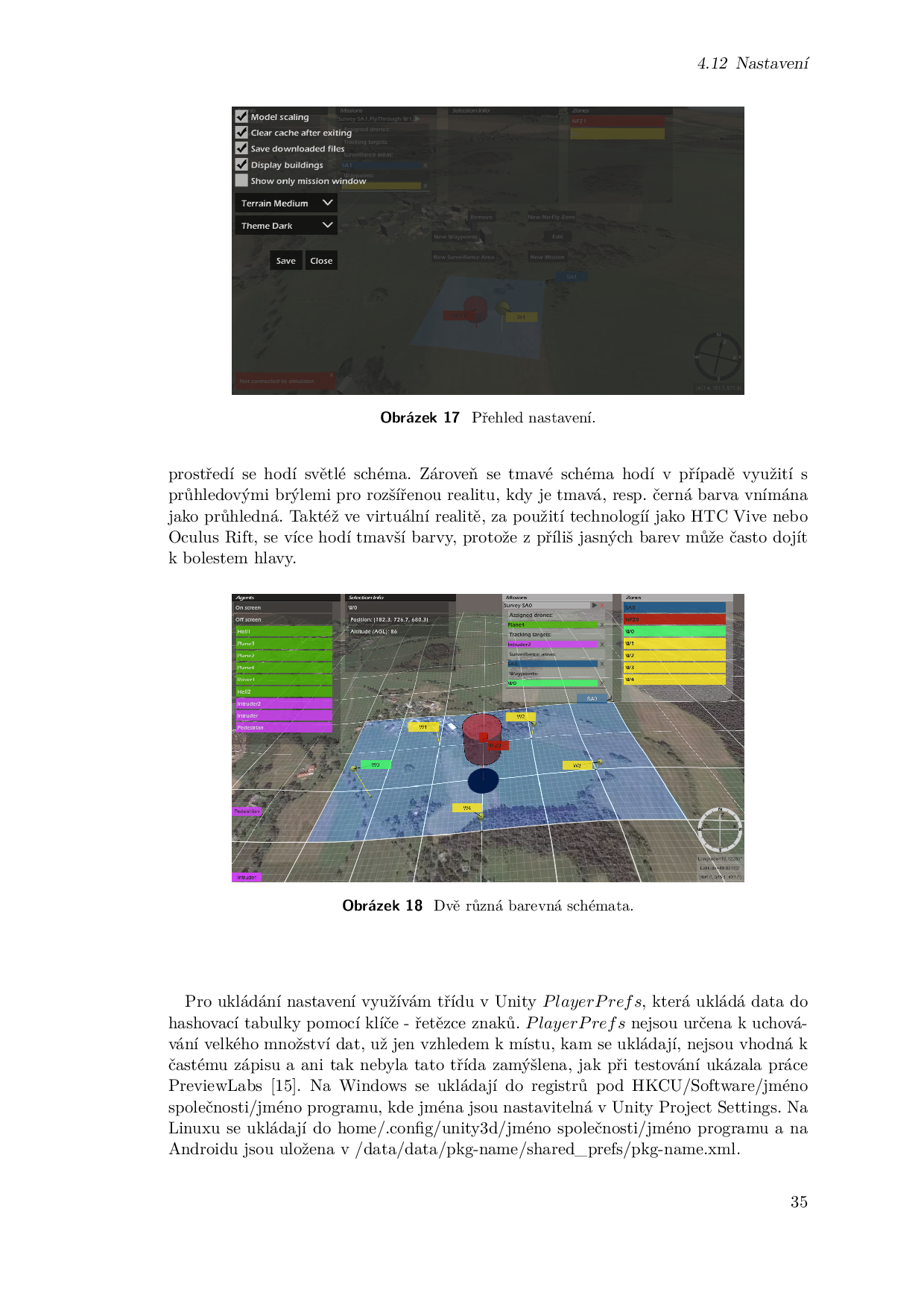
Obrázky