Drone simulator integration in Unreal Engine 5
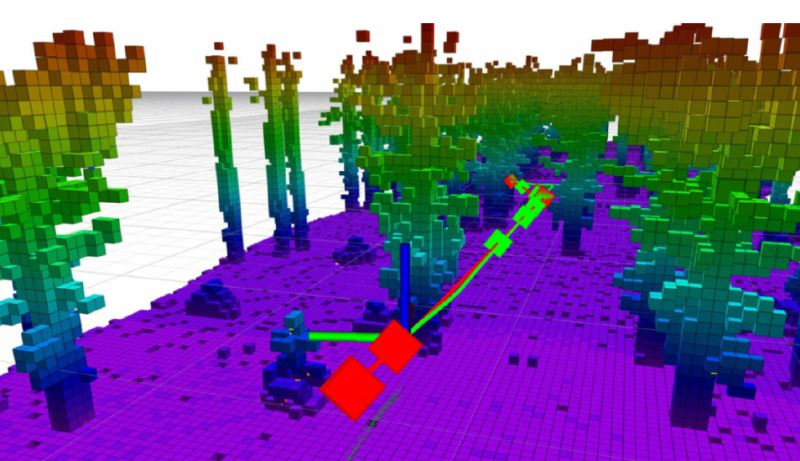
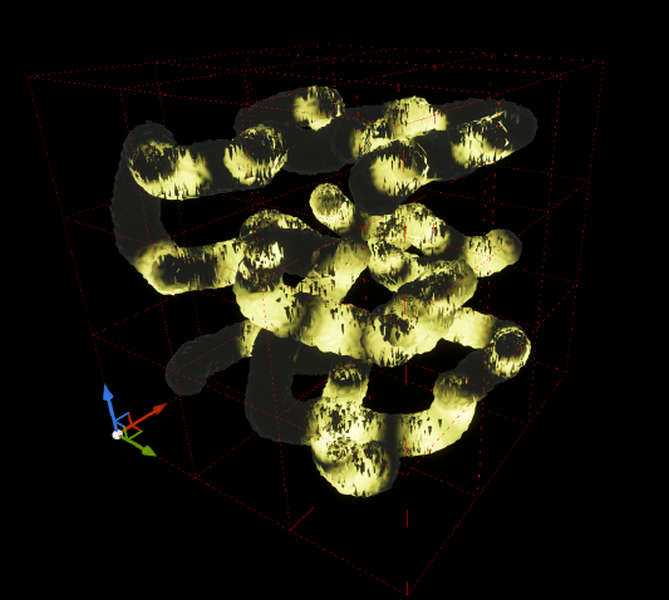
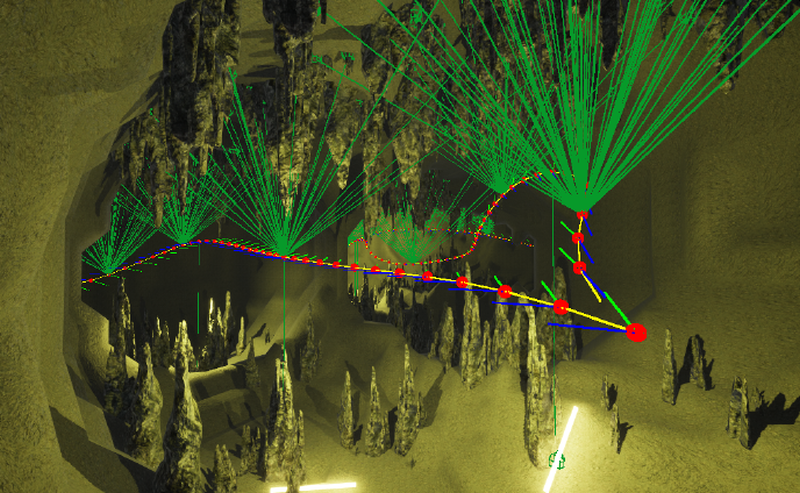
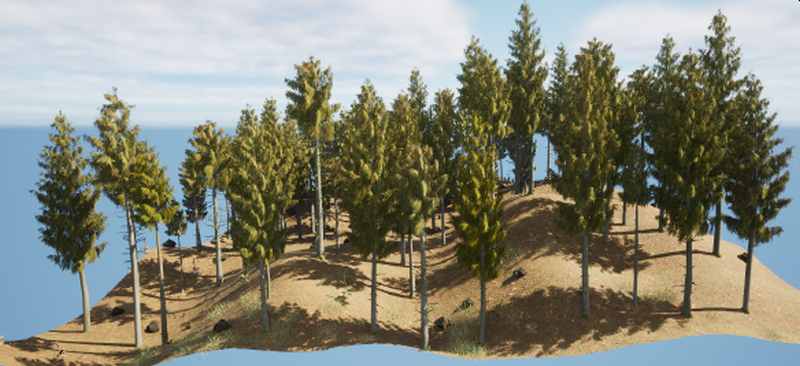
The bachelor thesis deals with the integration of a fully autonomous drone simulation system of the Multi-robotic Systems Group with the Unreal Engine 5 (UE5) game engine and the design of virtual environments suitable for testing algorithms for autonomous drone flight. The virtual environments were created using procedural generation and include an infinite forest and a closed cave environment. The Perlin noise generator was used to create the forest terrain and Procedural Content Generation in UE5 was used to place photogrammetric models of trees. The cave was created using the Perlin worms algorithm and the Marching cubes technique to create polygonal surfaces. At the end of the work, we performed test to verify the performance and usability of the proposed system coupling. The results show that the proposed system is able to realistically simulate and test autonomous drone flight algorithms in different environments.

Dean's award for outstanding bachelor thesis
Samples
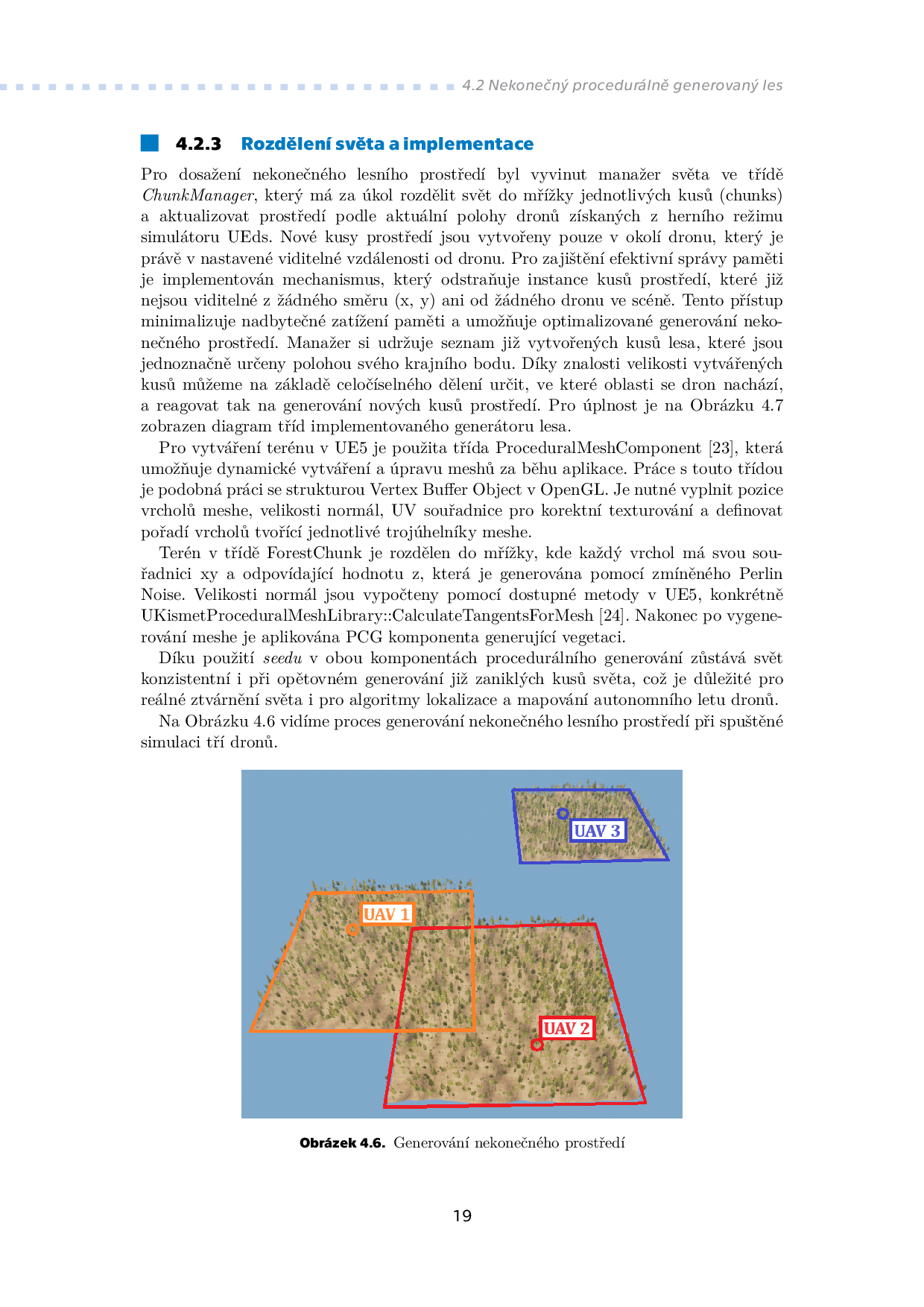
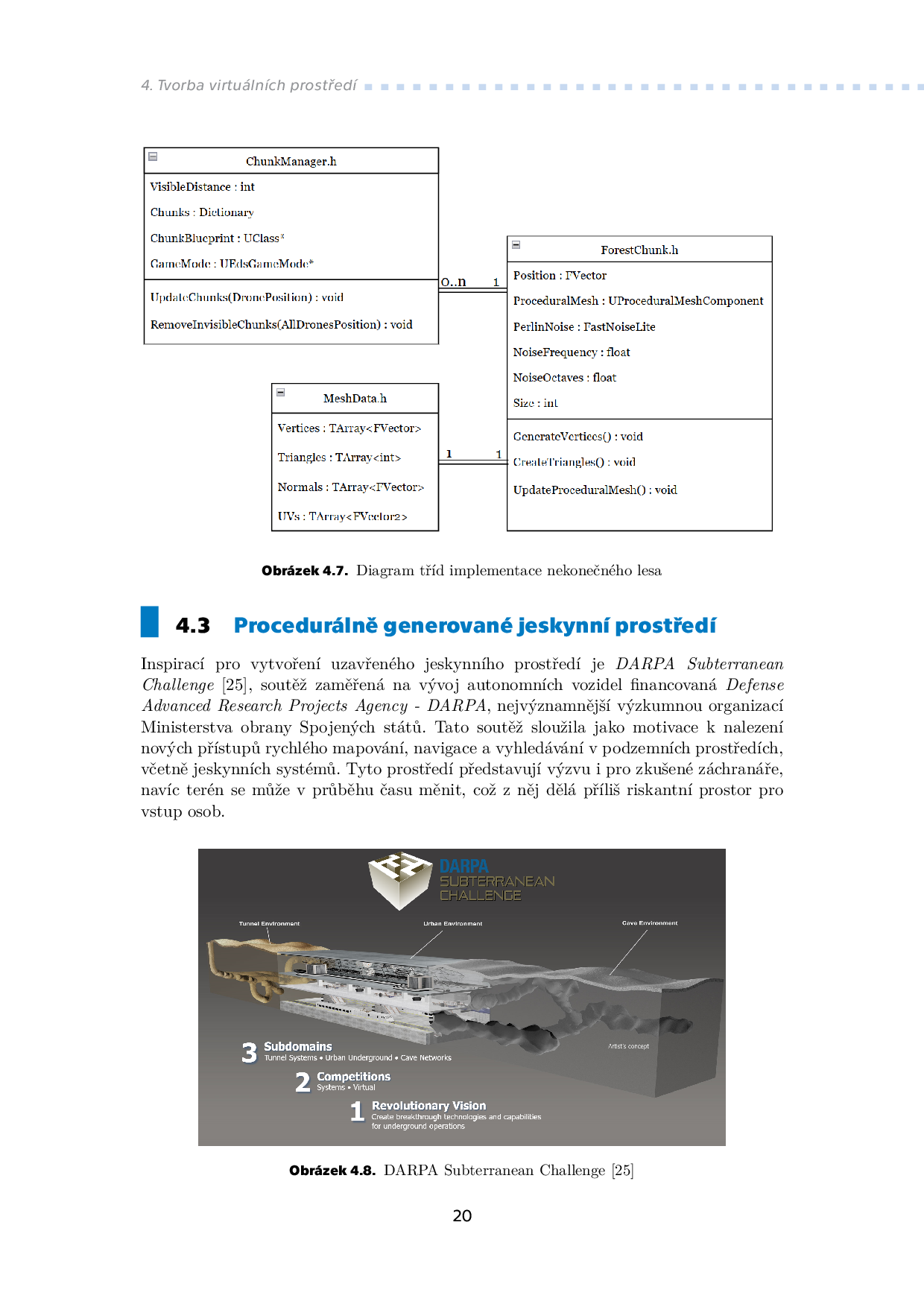
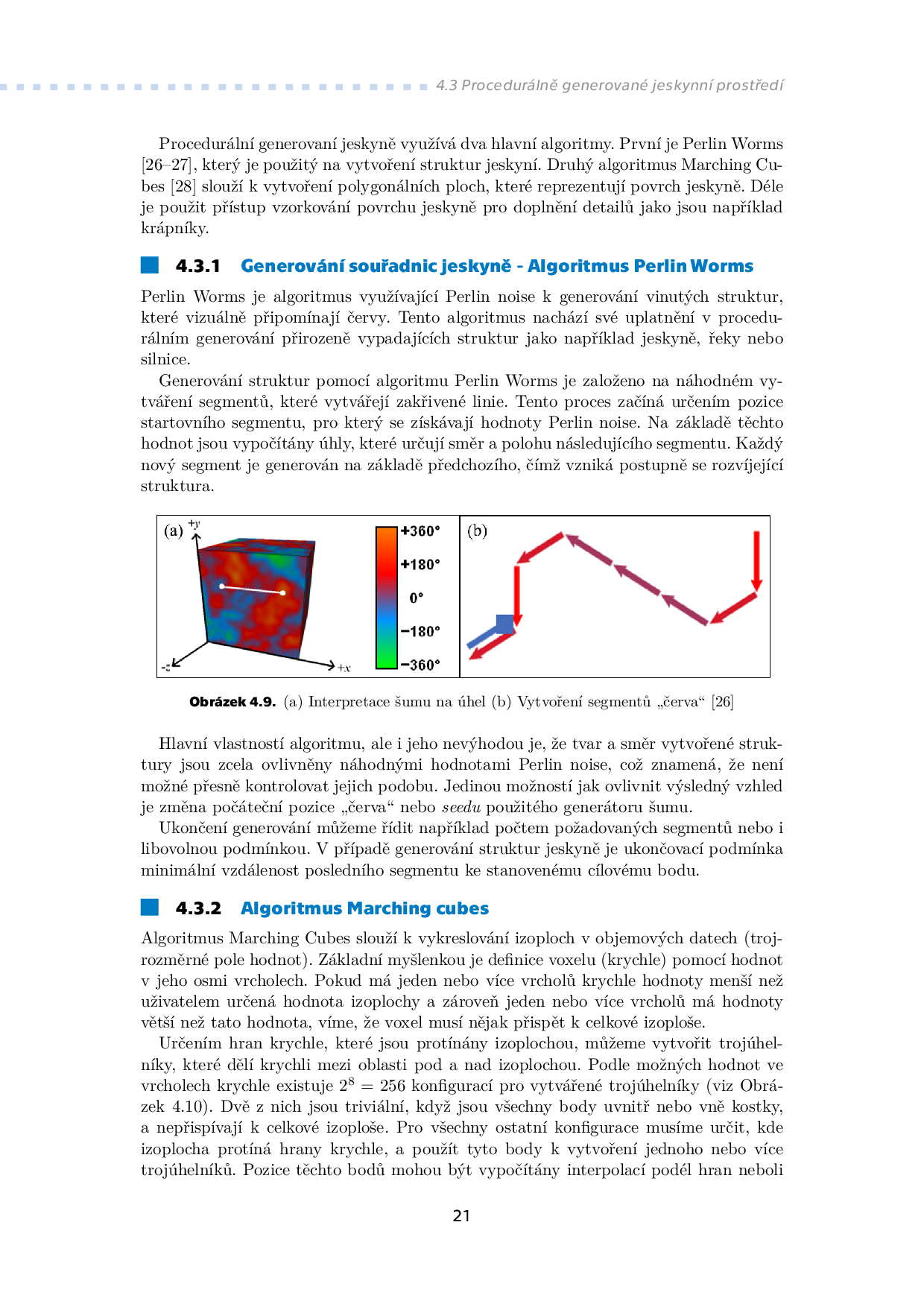
Images