Využití realtime 3D rekonstrukce a lokalizace ve virtuální realitě
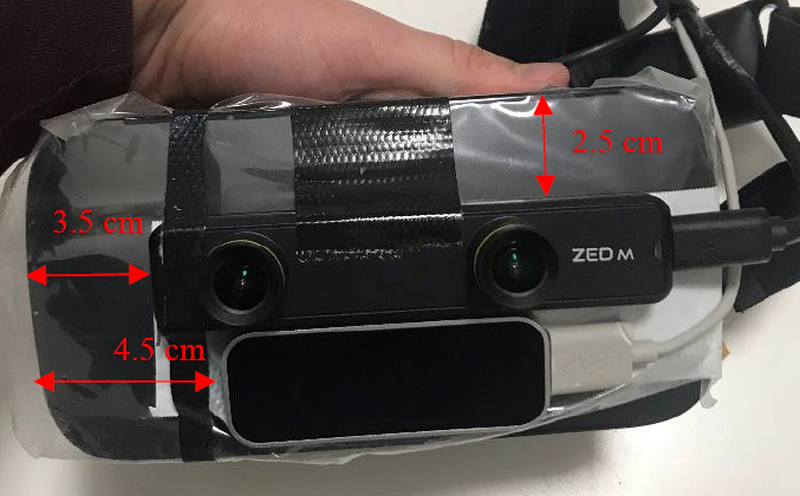
Tato práce se zabývá problematikou lokalizace ve virtuální realitě s využitím hloubkových dat pořizovaných v reálném čase, a to zejména v kontextu sledování pozice uživatele, jeho navigace ve známém prostoru a stability virtuálního světa. V práci je využito modelu získaného pomocí 3D rekonstrukce zejména jako prevence uživatelovi kolize s fyzickým světem. První část práce je věnována analýze hloubkových kamer a lokalizačních technik a principů. Na základě analýzy jsou představena konkrétní zařízení, která jsou dále v práci využívána. Těmito zařízeními jsou Acer Windows Mixed Reality headset a kamera ZED mini. Součástí práce je také návrh a implementace aplikace v herním enginu Unity, která umožňuje vybraná zařízení testovat na základě jejich schopnosti vlastní lokalizace v prostoru. V závěru jsou tato zařízení zhodnocena na základě výsledků získaných při testování s lidmi.

Ukázky



Obrázky